随着汽车产业朝着半自动和全自动驾驶汽车的概念迈进,各种复杂且灵敏的电子系统大大增加。从社会效益角度看,自动化有望使道路更安全,更少发生事故,并能主动缓解交通拥堵。自动驾驶需要多个高性能的互连传感器和子系统,才能可靠和安全地运行。电动或混合动力汽车的应用环境在电气层面非常严酷,且具有嘈杂的噪声,使可能存在的技术挑战进一步复杂化。系统可能会由于内部干扰源(例如EMI)、瞬态和外部影响(例如路边C2X基础设施)而导致影响其他重要系统的运行。
先进驾驶员辅助系统(ADAS)是车辆自动驾驶的基础,在完全自动驾驶时,它可以与更高级、更复杂的其它应用协同工作。当汽车以任何半自动模式(Level 1~Level 3)运行时,这种ADAS系统还能够直接通知驾驶员即将发生的情况。车辆的不同自动驾驶级别如图1所示。
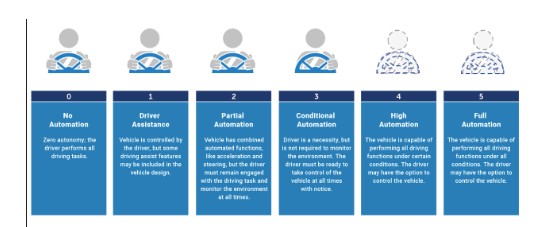
图1:汽车工程师协会(SAE)定义的车辆自动驾驶级别。
本文将重点介绍先进自动驾驶汽车传感系统的体系架构,以及用于在汽车子系统中传输数据的协议和接口。我们还将探讨干扰源,并提出减轻这些有害信号可能对车辆安全运行产生影响的技术。
自动驾驶车辆系统架构
在自动驾驶汽车中,“电子驾驶员”的眼睛和耳朵包含有无数种不同的传感器,参见图2,所有传感器都联网到中央计算机系统,由其负责在任何驾驶情况下安全地导航车辆。
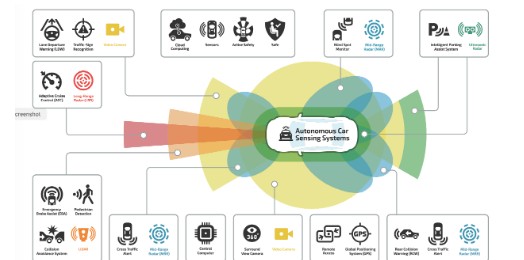
图2:先进的自动驾驶车辆感应系统。
传感器包括用于能够在车辆前方很长距离检测其它车辆、行人、各种移动物体的远程RF雷达,以及具有机器学习卷积网络的视频子系统,以检测行人、道路标志和车道偏离。其他传感器包括360度视频摄像头系统,用于使车辆知晓周围移动或静止物体情况。为了始终准确地确定车辆位置,高性能GNSS导航可提供厘米级定位精度和导航推测(Dead Reckoning)能力,即使当车辆进入城市中典型的城市街谷或通过隧道时,也可以进行精确导航。
可靠且强大的网络协议CAN和以太网互连子系统具有可接受的(<5ms)延迟级别。视频和雷达子系统的趋势是,它们越来越多地包括机器学习推理引擎,以便在检测到物体时进行检测和分类,而不是将额外的计算工作量交由中央系统。该方法还减少了实时延迟,这对于以超过30m/s(70mph/112kph)速度行驶的车辆来说是一个至关重要的设计考虑因素。延迟会影响及时的决策,并妨碍将云连接用于任何实时驾驶任务。例如,一个4G蜂窝网络的典型往返延迟为60毫秒,根据上述速度,车辆已经行驶过1.8米。 FlexRay和LIN是另外两个广泛使用的汽车网络协议。
为了满足车辆信息娱乐系统和视频传输要求,HD BaseT正在逐渐成为一种可行的网络协议。HDBaseT结合了HDMI和以太网的优点,使用单根电缆即可将音频、视频、以太网、100W以太网供电(PoE)、系统控件和USB汇聚在一起。这个协议针对不同层面进行了优化,建议采用单个非屏蔽电缆对来实现长达15m的设备连接。通过将不同的传输内容整合到一根电缆,还可以节省大量的电缆重量、安装工作量和材料成本。
为了使自动驾驶车辆安全可靠地运行,所有相互连接且相互依赖的系统都需要连续且无故障运行。如果传感器开始出现故障,或者监控电路子系统检测到性能不及标准,则必须立即发出警报,通知中央计算机以启动故障保护安全停车。
技术挑战以及解决策略
电子传感器和相关子系统通过利用高度复杂的模拟和数字组件来运行,这些设备容易受到电气瞬态、电磁干扰(EMI)和静电放电(ESD)等干扰。瞬态产生自电源轨,源于dV/dt的快速开关,并会产生比额定电源电压大许多倍的电压尖峰。大功率马达和其他电感性负载在运行过程中会导致出现快速浪涌瞬态,电动汽车中相关的驱动链无疑也是瞬态来源。而且,用于电动转向、舒适性和车身控制的小型马达以及电动驻车制动器也会产生明显瞬态。这些瞬态可以沿公共电源线通过传导进入子系统,也可能通过连接传感器的相邻电缆中的互相感应,进入到子系统或连接到中央计算机的子系统网络。如果没有足够的保护,瞬态会导致微处理器复位、锁定,或在极端情况下造成关键组件的物理损坏。
同样,感应的EMI可能会导致不可预测和不稳定的系统行为,这些EMI可能出自不同来源,包括无线接入点和智能手机等等。同样,也需要加以保护,以防止EMI明显地干扰关键系统运行。
静电放电对于敏感电子组件是一个需要特别关注的问题。这些敏感电子组件需要在整个供应链中和生产过程中进行特殊处理,但在最终的应用电路中也需要保护。像瞬态一样,静电放电会导致出现巨大的电压尖峰,并且可能是由于车辆橡胶轮胎与道路摩擦,以及人与织物的接触摩擦而积聚的能量所致。在低湿度地区行驶的车辆容易产生静电。
保护ADAS通信和控制子系统
图3重点显示了ADAS通信和控制子系统的主要功能模块,包括应采用的保护器件。
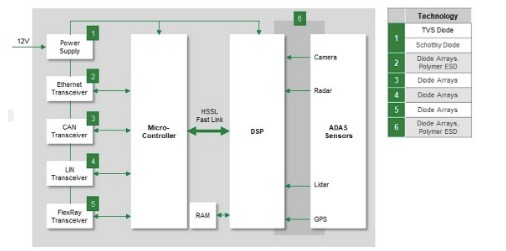
图3:ADAS通信和控制子系统以及对保护器件的要求。
每个通信链路(2、3、4和5)都需要瞬态和ESD保护,而且应该适合相应协议的电气规格和数据速率。最快的协议是以太网,其比特率通常在100Mbps~10Gbps范围内。对于高速差分以太网接口,推荐的ESD和瞬态浪涌保护方法包括使用聚合物ESD抑制器,例如经AEC-Q200认证的Littelfuse AXGD Xtreme-Guard系列。
图4显示了从差分双绞线到以太网PHY的以太网连接中配置AXGD系列器件的位置。 AXGD系列具有快速的响应时间,并能够吸收高达30kV和50A的瞬态,可凭借单个封装保护差分对。同样,由于其电容值极低,ESD保护不会影响高达1Gbps的以太网数据速率。
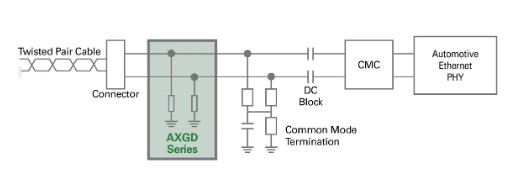
图4:用于以太网收发器的聚合物ESD保护器件功能框图。
对于CAN收发器接口,建议使用二极管阵列来保护系统免受快速瞬态和ESD影响。
采用齐纳二极管进行瞬态电压抑制(TVS)的另一个示例是Littelfuse SZ1SMB系列600W TVS二极管。 SZ1SMB系列可理想用于图3中的Item 1等电源,具有出色的钳位能力、快速响应时间,并可吸收高浪涌瞬态。
汽车电子标准
在为汽车电子系统而选择瞬态和ESD保护器件时,建议应该对适用的国际标准有所了解。有三个最基本的ISO标准,即ISO7637-2,ISO16750-2和ISO10605:2008。除了这些标准之外,汽车电子理事会(AEC)还制定了一系列质量标准,其中确定了汽车电子系统中使用器件的机械、电气和环境应力要求。相关标准包括用于半导体和二极管等分立元件的AEC-Q101,以及用于电容器、电阻器和电感器等无源元件的AEC-Q200。
结论
保护自动驾驶车辆的电子系统免受瞬态、EMI和ESD的影响对于确保汽车连续、可靠和无故障运行至关重要。 自动驾驶车辆有望显著减少交通拥堵,并为驾驶员、乘客和行人提供更安全的道路。 通过使用浪涌和静电保护元件,设计人员将更有信心相信,他们的系统会足够强大,且能够耐受任何不必要的电气干扰。
责任编辑:tzh