引言
GPS (全球定位系统)是美国第二代无线电卫星导航定位系统,它能够全球性、全天候、实时地提供导航、定位和授时信息,但它也要求对卫星有直接的可见性才能发挥其正常功能。在遇到城市高层建筑物、林荫道、立交桥及涵洞隧道等时,GPS 接收机所收到的导航卫星的信号质量会明显地下降,甚至干脆出现“丢星现象”。这使得单独使用GPS来导航定位不能够连续地为运动车辆提供导航定位信息。因此我们采用了组合定位技术以解决上述问题,下面具体分析。
航位推算(DR,Dead-Reckoning) 是一种常用的导航定位技术,其基本原理是利用方向传感器和速度传感器来推算车辆的瞬时位置,可以实现连续自主式定位。但由于其推算过程是一个累加过程,方向传感器的误差随时间的延长而积累另外,推算只能确定相对位置和航向。导航开始时,需要预知车辆的初始绝对位置和方向,因此,航位推算方法并不能单独、长时间地使用。将航位推算与GPS 组合起来,两者取长补短,可以弥补各自的缺点,保系统能在任何时候都能为运动车辆提供较为准确的导航信息。一方面可以利用GPS精确的定位结果辅助DR的初始化并且可以定期地用它对DR的定位误差进行在线校正另一方面,在GPS无法定位时系统又可以自动地切换到DR导航方式,直至GPS 恢复正常接收后,系统再回到GPS 与DR的组合导航方式。与此同时,再实时地对组合导航系统的输出信息与电子地图进行匹配,便可以将导航输出信息可视化,解决了司机定向难的问题。
车载GPS/DR组合导航系统的组成
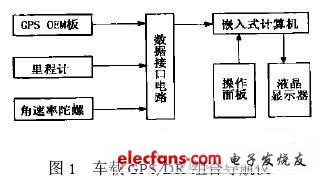
车载GPS/DR组合导航仪由3 部分组成:GPS 定位系统部分航位推算部分地图匹配部分。图1 为车载GPS/DR组合导航仪的原理图。
全球定位系统
全球定位系统由GPS-OEM 主板、数据转换板、天线及电源等组成。
目前,有很多厂商都能提供GPS-OEM 板产品,如SiRF、Conexant、Sych ip、GARM IN 等公司。其中美国GARM IN 公司是世界上最著名、深受用户信赖的专业GPS 厂家,在GPS 的定位、导航领域一直走在世界最前列。由于GARM IN OEM 板的定位速度快、工作稳定、耐电压冲击和高抗干扰性,因而此方案采用了GARM IN 公司出品的GPS15-LVC 板。
数据转换板与GPS-OEM 板连结,其作用是接收GPS 主板的原始数据、提取需要的数据并将其转换为与用户机所需的数据格式,通过串口发送给用户机。
航位推算系统
航位推算系统由角速率陀螺、里程计、低通滤波器、V/F 转换器、电平转换器、计数器、微处理器、通讯线路等硬件组成, 其中方向传感器采用角速率陀螺, 距离传感器采用里程计。
航位推算方法是一种常用的自主式车辆定位技术,其中航向和距离传感器被用来测量位移矢量,从而推算车辆的位置。车辆在tk 时刻的位置可表示为:
![]()
其中,(x0, y0)是车辆在t0时刻的初始位置,(xk , yk)为车辆在tk 时刻的位置Si,θi分别是车辆从TI 时刻的位置(xi, yi)到TI+ 1时刻的位置(xi+1, yi+1)的位移矢量的长度和绝对航向。相对航向定义为连续两个绝对航向之差,用Xi表示。若给出了t0、t1、tk时刻的相对航向测量值Xi,则tk时刻的车辆绝对航向θk 可由下式计算:
![]()
地图匹配
地图匹配算法采用概率决定的方法。系统必须知道起始点的位置和航向角。通常用速率陀螺仪给出的航向变化与车辆预期位置附近的地图特征进行相关性比较,当测量出的车辆航向的显著变化与数字地图的矢量路线变化相关,那么车辆的真实位置可以在地图上确定。根据车辆的具体位置可校正传感器的漂移误差,同时对车轮直径误差等误差进行标定。相关性地图匹配算法在车辆行驶航向有比较大的改变时(例如车辆在十字路口拐弯时) 效果最好。
试验结果
为了验证系统的定位精度、可靠性,对比GPS 系统与GPS/DR组合系统的性能,利用1∶500 的比例尺地图制作了电子地图,选择跑车路线如图2 所示,进行跑车试验。所得试验结果表明当单独GPS 定位时,所得定位轨迹是不连续的,并且有“上房现象”。而采用GPS/DR进行组合后,其定位轨迹连续,且始终行驶在正确的道路上。

结论
GPS/DR组合车辆定位导航系统将GPS 与DR相结合,从而提高了系统的有效性、完整性和精度。利用DR航迹推算系统能保证卫星信号丢失时车辆位置信息输出,还能利用地图匹配技术来进一步地提高导航的精度。此系统具有全方位、全天候、无遮挡、高精度的特点,具有良好的应用前景。