很多系统开发人员喜欢使用完全集成式“智能传感器”,因为这些器件通常可方便地给出数字输出,对于偶尔使用的用户来说可以规避乏味的模拟电路设计挑战所带来的风险。虽然避开模拟电路设计问题的动机可以理解,但系统集成人员了解智能传感器的重要模拟特点也是非常关键的—比如带宽和噪声,因为这些因素会影响重大的系统级决策,如数据采样和处理速率。
以自主驾驶车辆(AV)平台为例,该平台采用ADIS16460的陀螺仪作为其导航控制系统(GNC)中的反馈检测元件。如果开发人员未能考虑这些陀螺仪的330Hz带宽,那么就可能完全根据AV平台的运动配置来设置角速率反馈环路中的采样速率。
例如,假设GNC工程师相信可以将AV平台的运动配置限制在4Hz频谱成分以内,那么以40 SPS速率进行数据采集就会看起来是一种对于GNC角速率反馈环路的采样速率而言较为保守的做法。不幸的是,如果不进行任何前置滤波,那么这种“保守”的做法实际上会欠采样330Hz带宽,而这样就会有很多劣势。图1显示了其中一个劣势,即对输出奈奎斯特频段(20Hz)内的噪声能量进行重整分配。
图1中,绿色曲线表示自然速率噪声密度(RND),而红色曲线表示同样的总噪声能量分布在较窄的20 Hz带宽内的结果。
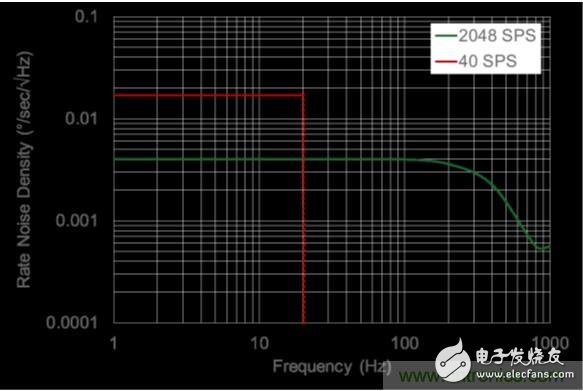
图1. ADIS16460角速率噪声密度
假设总噪声平均分布在低采样速率( 40 SPS )奈奎斯特频段内,通过下述关系式可以预测,得到的速率噪声密度将大约为0.017°/sec/√Hz:
这意味着使用2048 SPS全采样速率时,对40 SPS数据的任何数字滤波都将导致产生比同类滤波器多大约4倍的噪声。根本问题在于,对于系统集成人员而言,明智的做法是考虑智能传感器中的关键模拟属性,通过适当选择采样速率以及正确设计数字滤波器,便能有机会进行性能优化。