Boston Dynamics公司是脱胎于美国麻省理工学院的又一个伟大公司,不仅开发出了行动时具有动物力量和敏捷性的机器人,还开发出了能够爬垂直墙壁的其它机器人以及能够在狭窄空间中操控的变形机器人。所有这些设备都是放大和改进了动物与人类的能力,可执行类似超人的任务。
本文主要介绍这些创造物中的一种——BigDog,这是一个长有四条腿、三英尺高和三英尺长、重240磅的狗型机器人,它可以爬上泥泞的斜坡,并能承载340磅的负重。
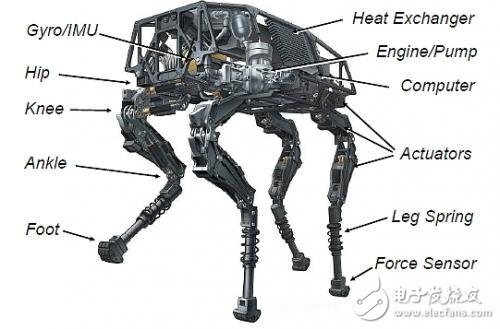
BigDog是一个长有四条腿、三英尺高和三英尺长、重240磅的狗型机器人(照片由Boston Dynamics公司提供)
共有50个传感器向计算机馈送信号,帮助维持机器人的平衡和方向(照片由Boston Dynamics公司提供)
BigDog采用了一个15马力的微型赛车用引擎。该引擎由一个两冲程/单缸发动机组成,采用水冷方式工作,可给液压系统供电,使之操控机器人的四条腿。这些腿是设计师仿照大型哺乳动物的自然动作设计的。
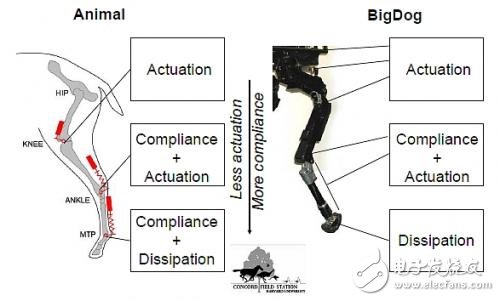
机器人的腿是设计师仿照大型哺乳动物的自然动作设计的。(照片由哈佛大学Concord Field StaTIon提供)
共有50个传感器给计算机馈送信号,帮助机器人保持平衡和方向,并在跌倒或被迫偏离既定路线时帮助机器人恢复。
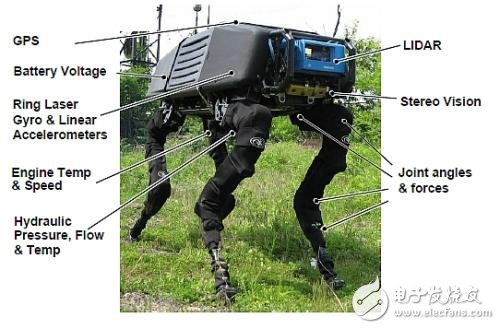
BigDog的重要外部功能是性能的关键(照片由Boston Dynamics公司提供)
惯性传感器
惯性传感器用于测量狗的姿势和加速度,关节传感器测量在关节处工作的致动器动作和力量。板载计算机从这些传感器收集信息,并提供对BigDog在空间中如何移动的估计。还有其它传感器监视BigDog的动态平衡:液压、流速和温度、引擎速度和温度。
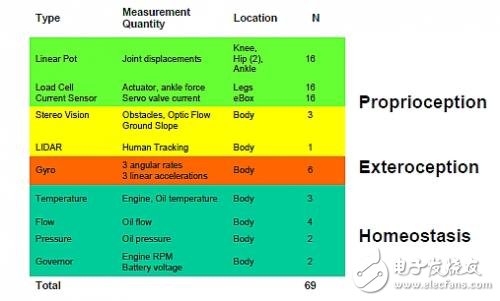
机器人通过众多传感器感知空间(照片由Boston Dynamics提供)
在WordPress上发表的M.Wonders Masters论文《The body and the senses: the percepTIon of space(身体与感觉:空间感知)》中引用了Brian Massumi的话,他介绍了在我们的身体中三种不同层次的感觉是如何产生我们的真实感体验的。他把这三个层次称为外在感觉、本体感觉和内在感觉。外在感觉包括视觉、听觉、触觉、味觉和嗅觉。Massumi认为本体感觉“将身体遇到物体时的行动和放松转换为肌肉的关联性记忆”,而内在感觉也称为内心感觉,“会立即记录由5个外在感觉收集到的刺激,甚至在它们被大脑完全处理之前。”这三种不同层还对应三种不同类型的主-客观关系。