在今年2月,全球领先的半导体解决方案供应商瑞萨电子株式会社(以下简称“瑞萨电子”)宣布成功开发出了一种电机控制专用电路技术,可助力车厂满足更严苛的碳排放标准。
这种新开发的技术名为“智能电机定时器系统(IMTS)”,是一种可集成于未来电动车和混合动力车微控制器的专用电路模块。对于在电动车电机控制中至关重要的磁场定向控制(FOC)(注1),它的操作时间仅为0.8微秒(μs),是世界上最快的速率(注2),还不到在相同操作频率下运行的CPU上软件处理时间的十分之一。这将有助于开发具备优异能源效率的高速电动车电机和具有高速开关性能的逆变器系统。
此外,这种独特的电路还可以为汽车动力系统提供功能性安全支持。
近年来,随着燃料效率方面的要求不断提高,电动车、混合动力车和插电式混合动力车在汽车市场中所占的份额逐渐扩大。为进一步提高电动车的应用范围,有必要增强电机控制的能源效率。
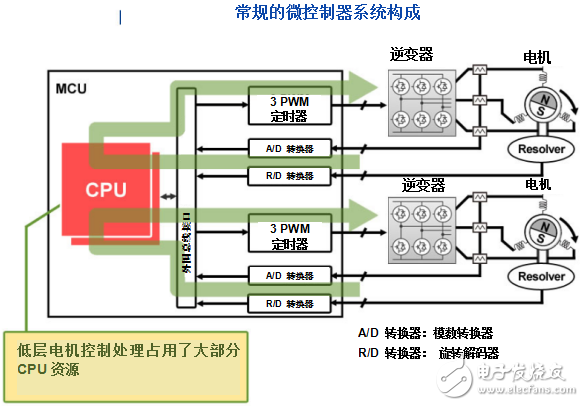
因此,不仅需要对电机进行机械性改进,提升电机的电子控制单元的功能和性能也十分重要。可用于支持下一代电动车、混合动力车以及插电式混合动力车的电子控制单元需要非常领先的功能和复杂的控制软件,而这势必会大幅增加这些电子控制单元中的微控制器的处理负荷。与此同时,为确保在高温环境中的高度可靠性,还需要限制汽车微控制器产生的热量。因此,需要将微控制器的内部电路(包括CPU内核)的操作频率保持在相对较低的水平,而这会妨碍其性能的提升。
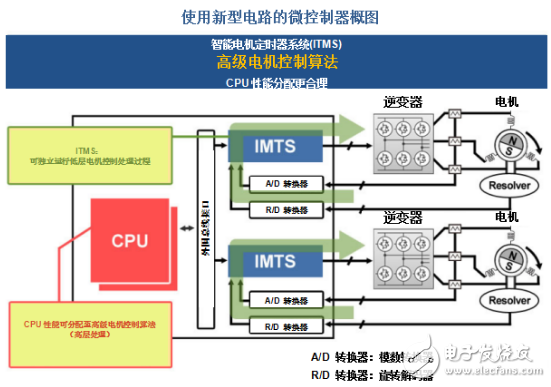
为满足上述需求,在微控制器执行的众多电机控制中,瑞萨电子将IMTS作为静态处理的专用电路模块,因为该处理过程通常需要高反应性能,如采集传感器数据,在此基础上计算并输出控制值等。IMTS独立于CPU,可自主运行,可显著降低电机控制微控制器的CPU负荷。节省下来的CPU性能便可以分配至高级电机控制算法上,从而提高未来电动车、混合动力车和插电式混合动力车的能源效率。
专用电机控制电路技术的关键特性:
(1) 开发静态电机控制处理专用电路模块和支持独立运行的电路技术
电机控制需要一系列涉及磁场定向控制(FOC)的静态处理,在每个控制周期内MCU会采集电机电流值和角度值在计算后得出下一周期的控制值;在控制值的基础上会生成PWM输出(注3)。当多种电机控制程序同时运行时,对于以320 MHz频率运行的瑞萨电子40nm汽车MCU,产生的总处理负荷最高可占到其CPU(注4)性能的90%。新开发的IMTS是一种支持FOC操作的专用电路模块,可在很大程度上分担CPU的处理负荷。它以专用电机控制定时器电路的形式配置,链接紧凑,因此在每个定时器电路管理的控制周期中执行的一系列处理—从获取电流值和角度值到PWM信号输出,均可独立于CPU运行。
由此便消除了之前本应由CPU处理的负荷,而释放出来的CPU性能现在则可分配至包含高级控制算法的软件,提高能源效率。通过为FOC配置专用电路,IMTS可以将操作处理时间减少至0.8μs,与配置在CPU上的软件相比,用时不到其十分之一。对于使用新材料制成的电源设备,新技术实现的处理性能可满足具备高速开关性能的逆变器控制要求(性能示例:100kHz开关频率,控制周期10μs),包括使用以碳化硅等新材料制成的电源设备的逆变器。
(2) 专业技术的发展为汽车动力系统控制提供功能安全保障
汽车动力系统控制必须能够确保功能安全,以便及时检测组件故障,将系统自动转换到安全状态。这一般是通过使用两个微控制器提供系统冗余来实现,或者也可使用配置内部冗余电路的MCU,但后者的成本会相对较高。
新技术使用的MCU带有两个双核锁步配置的CPU,可定期监测IMTS电路的内部运行。该方法不仅可以降低成本,还可以实现高速控制和功能安全。功能安全会增加CPU的负荷,但在实际使用中,仅占CPU总处理能力的2.4%(注5)。
(3) 电路技术可灵活校正外部传感器信号误差
为实现高精密微控制器精确的处理性能,需要采集高精度的传感器信号值。但实际运行中却会有各种原因导致的错误,例如因传感器安装位置引起的误差。新开发的IMTS可加载用户开发的软件实时校正误差。此外,IMTS还可以独立执行该校正处理,不会对CPU造成额外的负荷。正确的传感器信号值,可在电机运行中实现更精确的处理性能和更高的能源效率。
瑞萨电子目前正在测试采用该技术的40纳米MCU原型(带片上闪存)。它使用真实的电机驱动系统确认真实系统中的操作。瑞萨电子旨在通过这种专用电机控制电路技术为电动车、混合动力车和插电式混合动力车的电子控制单元实现更高的能源利用效率。
在2017年2月5日(当地时间2月6日)于加利福尼亚州洛杉矶市举行的2017年国际固态电路会议上(ISSCC 2017),瑞萨电子就新技术发表了论文。
(注1)磁场定向控制(FOC)是一种广泛用于电机控制的基本处理算法,这种电机控制算法中通常使用复杂的计算,包括三角函数,进行坐标转换,从而生成更接近指定控制值的DC信号。
(注2)2017年2月7日,根据瑞萨电子的研究。
(注3)PWM代表脉冲宽度调制,该类脉冲信号用于驱动使用MCU的外部功率设备。
(注4)预计下一代系统将需要12.5μs的控制周期。CPU负荷的计算值是基于每个控制周期中同时发生两个电机控制操作(例如,前轮和后轮的驱动电机)。
(注5)CPU负荷的计算值假设电机以100,000rpm的速度运行时,在一个转动持续期间检测到故障。