1、前言
现代车辆电子信息技术的三大基础包括:信息采集(传感器技术)、信息传输(通信技术)和信息处理(计算机技术),传感器属于现代车辆电子信息技术的前沿产品。
轮胎的故障是诱发和导致交通事故的主要原因之一,对轮胎、车辆和路面的状态进行准确可靠和容错的连续监控,是传统传感器难于精确完成的一项复杂的工作,可采用基于计算机技术的虚拟传感器测定路面与轮胎间的摩擦、路面条件、轮胎压力和轮胎转动平衡状态等参数。虚拟传感器是基于传感器硬件和计算机平台、并通过软件开发而成的,并可利用软件完成传感器的标定及校准,实现车辆最佳性能指标的控制。传感器通过数据采集器接至计卜算机,由计算机完成传感器的检查、传感器参数的读取、传感器设置和记录工作。
2、虚拟传感器组成
车辆轮胎虚拟传感器的硬件部分主要包括计算机系统、优良性能的轮速传感器、轮压传感器、以及连接件和仪表。虚拟传感器还必须包括其软件程序包,即数据处理程序、补偿程序和测试处理程序等。
虚拟传感是一种信号处理技术,用于估计系统中不能放置物理传感器的位置处的响应。研究车辆轮胎虚拟传感器可进一步研究路面和轮胎之间的摩擦、轮胎膨胀压力与车轮的不平衡等影响轮胎参数的因素,多传感器融合系统将来自于各个传感器的资料结合起来,描述被观测系统,以取得较使用单个传感器更为准确、更为具体的结论。
利用计算机技术,虚拟传感器可以仅仅采用普通的传感器,即车轮转速传感器、车轮转矩传感器以及车辆的CAN总线传输信息,再根据一定的计算机算法,完成对车辆轮胎摩擦模型的计算,从而获得有关轮压的有效信息。其测量的输入与输出如图1所示。研究开始主要是估计路面摩擦系数,然后估计车轮压力。
3、路面附着特性
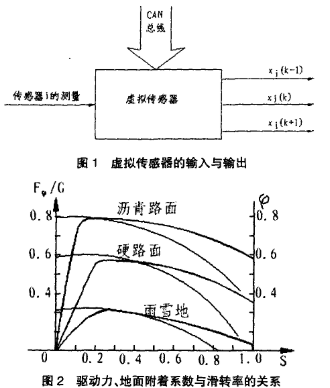
车辆轮胎的模型之一是依据地面机器系统力学理论,由该理论可知:不同的地面条件产生的附着系数是有差异的。车辆驱动力、附着系数与车辆轮胎滑转率的关系如图2。从图中可以看出:在附着系数一定,轮胎滑转率s=0时,驱动力与车辆重量的比值Fφ/G最大,滑转率s从。开始增加时,附着系数φ随之增加,当车辆轮胎滑转率s=0.10~0.20时,附着系数达到最大φmax,如果滑转率继续增加,附着系数开始下降。当轮胎滑转率s达到100%时,轮胎发生完全滑转。
滑转率通常定义为车轮的相对速度与切向速度的比。其表达式为公式(1)。附着系数为φ=Fφ/G。在滑转率十分小的情况下,车轮滑转率与附着系数满足线性方程φ=ks,其与轮胎的特性有关,也与路面的摩擦有关。

模型表明精确的车轮滑移率是驱动力的一次函数μ加上一个均值白噪声,均值白噪声主要是由于前后车轮半径的不同所造成的。
转速传感器测出各个轮胎上工作转速ω,并从CAN总线上获得发动机传送至各个轮胎上的转矩M,通过计算机对模型求解,可初步获得各个轮胎的滑转率和附着系数。
4、虚拟传感器测量车辆轮胎压力的算法
目前,国外对胎压检测的虚拟传感器算法进行了大量研究与开发工程,其中申请的专利有40多个,大多利用了标准车轮转速传感器,主要的方法有:
4.1振动分析算法
利用轮胎橡胶在受到路面冲击时的弹性特性,对车轮转速的频谱进行抽样分析,并去除车辆其它部分引起振动时所导致的扰动。振动分析可通过快速傅里叶变换FFT的检测方法完成。
该方法基本的思路是将轮胎看作一个“弹簧一阻尼”系统。根据轮胎模型和充气压力,最理想的振动频率一般在40-50Hz之间,但也有其他较高或较低的频率。通过对不同轮胎的振动进行研究和筛选,监控其振动的频率,从而得出正常频率的值,同时检测出非正常值。
不管是基于模型或者是FFT方法,在应用振动分析之前,都要对速度的测量进行滤波。运用拟合的最小二乘法,得出一个具.有改善了的干扰比率的速度信号。补偿的速度信号波形清晰地显示出45Hz左右的一种振动模式,如图3所示。

利用FFT测量仪和一个低通过率的滤波器可以计算平均周期图,每次测试中可自动计算出如图4所示的峰值。离线后,可以检测15%的轮胎压力降,但是考虑自动设置阈值以及很低的错误警告率,检测30%的轮胎压力降更为可信。FFT是对数据的成批处理,有一定的滞后时间。图4中利用了大量305的测试数据。


采用一个二次“阻尼一弹簧”模型时,计算轮胎压力的相关参数值有

基于模型的振动分析容易引进拟合方法,图5中所给出的就是利用拟合的最小二乘法得出的振动模式。利用这种滤波器,我们可以可靠地在5s之内检测到30%的压力降。这种滤波器能以最低1OOHz的频率处理数据,计算量比FFT方法显著下降。
利用一台仅以20Hz运行的卡尔曼滤波器,在同等计算量的情况下比RLS具有更强的能力。图6不同轮胎压力下,卡尔曼滤波器的振动估计模式,比原来少5倍的计算量,这种新的方法检测到15%的压力变化的速度与RLS算法检测30%的一样。
4.2基于轮胎半径的轮胎压力计算
最常见的轮胎压力计算是基于静态非线性变化的各轮胎速度的差值,当车轮大小一致时这一值接近于零。
路面摩擦指示的卡尔曼滤波器的滑转偏移量能很好反映相对的车轮半径,测量数据是线性的,该方法对噪声反应不灵敏。滑转偏移量可以检测左右车轮的相对误差,利用横摆率滤波器可计算前后车轮之间的相对误差,从而计算出车轮半径。
现有的车轮压力测定方法大多是基于对车轮速度的静态测试,设ω1/ω2=ω3/ω4,脚标为各车轮的代号(左前轮1,右前轮2,左后轮3,右后轮4)。当车辆匀速直线或圆周行驶时,此车辆车轮转速方程的值为零。这种信号的低透过性形式具有不小于0的非正常偏差,这超过了TPI所能利用的基点值。另外,数据的非线性变换引起的不合要求的统计状态、弯曲强度的不足、不同的摩擦水平、轮胎磨损等等都限制了这种方法的可靠性。
我们发现,基于模型的方法能很好的顾及到上述问题,使用性能有显.著的提高。所用的基本滤波器是路面摩擦指示滤波器(RFI),高精度横摆率(HPY)和绝对速度指示(AVI)滤波器,后两者适合轮胎压力测定,相关信息见表1。

当所有的轮胎气体慢慢漏出时,车辆半径与理论值的偏差可以用检测仪器的diffusion功能键完成。
经过实地试验,对所有的方法进行了比较,得出的结论是最后一种方法在精确性、快速响应特性、强度和计算复杂性(低阶模型和低抽样频率)等方面具有最优性能。
然而,在特定的情况下其它方法在某些方面可以作为一种很好的补充,因此最终的算法系统应该是一种多算法的组合。
5、结论
虚拟传感器通过其他传感器的信号间接测得信息,测量路面和轮胎间的附着系数和轮胎压力值,而所需要的专用传感器是很昂贵的。通过精确测量车辆车轮速度信号,借助计算机技术可得到摩擦和轮胎压力。附着系数的虚拟传感器技术现已日渐成熟,开始引入工程应用中。轮胎压力虚拟传感器技术目前尚在研究阶段,研究方法集中在基于振动的虚拟传感器技术,和基于车轮半径模型的虚拟传感器技术。但对于复杂多变的外部干扰因素需要CAN总线的修正信息。
责任编辑:gt