佐思汽研发布了《2022年多域计算和区域控制器研究报告》。
随着智能汽车向更高级别的自动驾驶发展,对算力、通讯带宽、软件、安全等方面的要求也越发严格。在这一趋势的推动下,汽车电子电气架构从域集中架构逐步向多域融合,再向(准)中央计算架构演进。目前,汽车多域计算设计思路主要包括以下五种:
多域计算的五类设计思路和案例
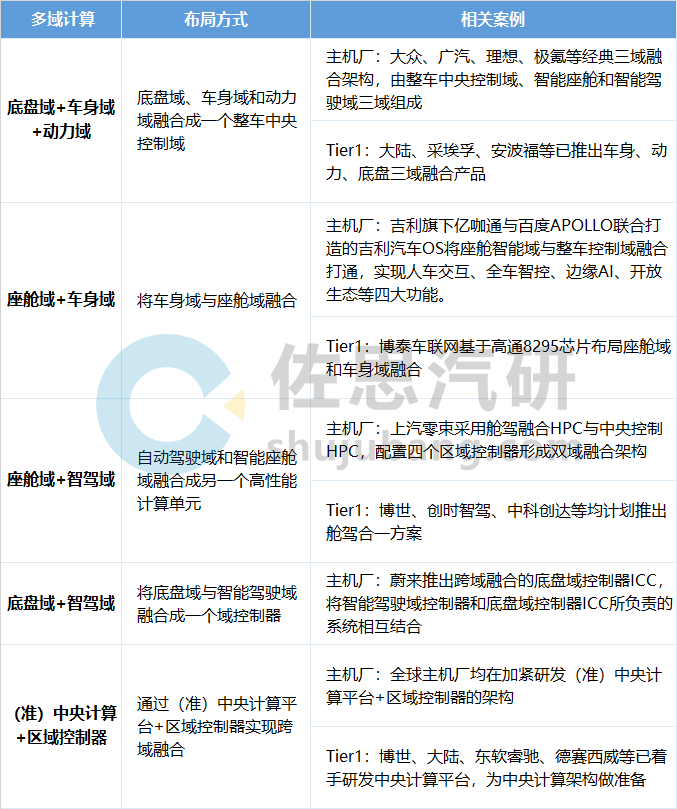
来源:佐思汽研《2022年多域计算和区域控制器研究报告》
行泊一体&舱驾合一,多域计算的重要方向
行泊一体方面,过去主要将低速泊车功能融合到座舱域,形成所谓的舱泊一体方案;随着大算力平台演进,2022年无疑是L2+行泊一体发展元年,越来越多的车辆将支持实现打灯自动变道、匝道至匝道自动驾驶、记忆泊车、全自动泊车等多场景自动驾驶。 舱驾合一方面,舱驾融合是众多OEM、Tier1发力的方向, 预计2024-2025年将陆续实现量产投产。从芯片厂商来看,高通8795芯片将支持座舱和自动驾驶多域融合计算,2024年将实现量产装车,国内中科创达、毫末智行等已着手开发;英伟达Orin X除了自动驾驶部分,还将全面融合座舱应用开发,通过英伟达DRIVE IX软件栈,实现自动驾驶和舱内算法融合。
➤ 知行科技IDC高低速行泊一体式域控解决方案
知行科技专注于自动驾驶域控制器的研发,公司的高算力自动驾驶控制器继2021年10月拿到极氪001订单超10万套后,陆续获得长城、奇瑞、吉利、SMART等多个一线主机厂的多个车型量产定点。 知行科技还推出了最高可支持城市NOA及AVP等行泊功能于一体的域控制器IDC产品。该IDC产品分为IDC MID版和IDC HIGH版,其中标准版将于2022年在多家头部车企新车型上交付应用。
知行科技行泊一体域控制器IDC产品配置情况
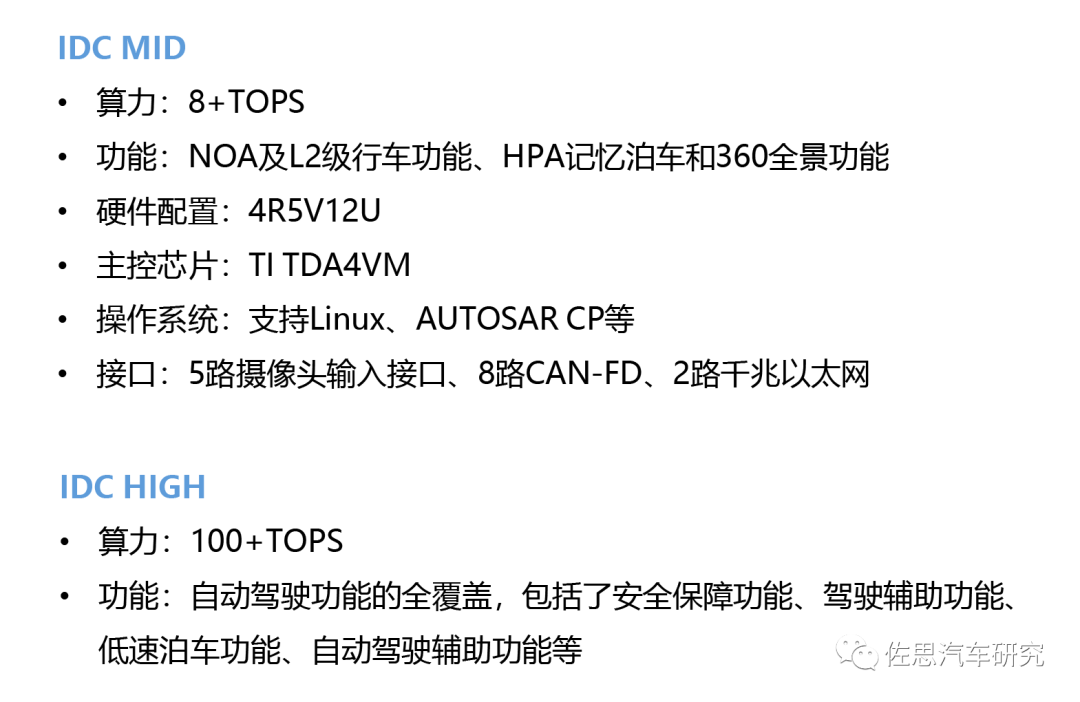
来源:知行科技
知行科技端到端全场景智能驾驶是以行泊一体的域控为载体,以L2++智能行车和智能泊车为基础,利用硬件埋点、大数据闭环优化验证及OTA远程软件更新技术实现对未知场景数据的获取、训练及优化后算法的更新,不断完善智能驾驶算法适应更复杂的场景,将全场景的范围不断扩大,最终实现全场景适应。
知行科技端到端全场景智能驾驶解决方案
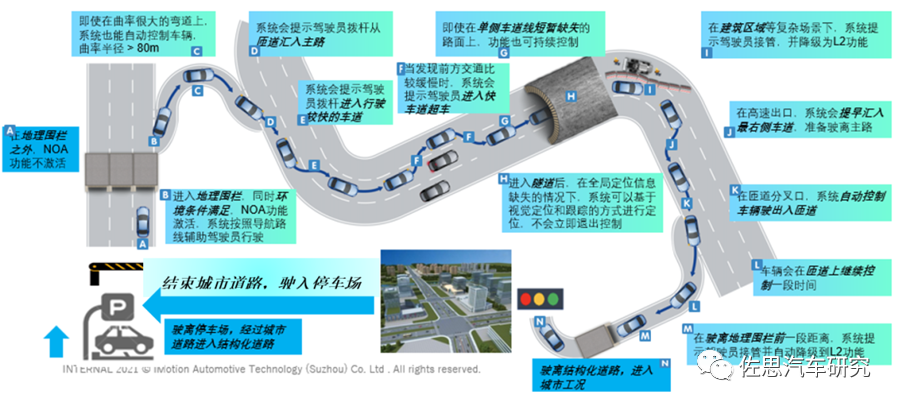
来源:知行科技
除了行泊一体外,智能驾驶域与智能座舱域两域融合也是大势所趋,知行科技正联合合作伙伴,探索多域融合解决方案。
➤ 东软睿驰的行泊一体域控制器持续升级迭代
东软睿驰推出的第四代自动驾驶域控制器X-Box是基于SDV开发模式下的全新L2+级别域控制器标准品。产品基于地平线征程5系列人工智能芯片,具备L2+级别行车与泊车功能,支持8M摄像头、4D点云毫米波雷达和激光雷达的接入,场景覆盖高速路、城市快速路、部分城市道路和多类停车场。

来源:东软睿驰
第四代自动驾驶域控制器X-Box采用SOA软件架构的设计方案,软件及算法按照模块化、服务化开发,支持数据闭环机制下的端云协同自动驾驶,同时支持全新一代整车E/E架构,可实现域内、跨域的服务订阅与发现,软件灵活部署和应用层的快速迭代,以及系统架构充分开放、多维度全栈软件能力开放和联合开发等功能,合作伙伴可以快速开发应用、应用软件复用,同时为开发伙伴提供丰富的软件开发工具。
同时,第四代自动驾驶域控制器X-Box的安全性设计按照ISO 26262和ISO 21434对功能安全和信息安全进行开发,对行车典型场景和泊车典型场景实施了最小风险策略,对车端、云端、手机端的网联系统实施了安全启动、安全存储、安全升级、安全通信等模块的部署。在驾驶安全和网络安全两方面帮助车企和消费者提供保障。通过标准化硬件、平台化软件、工具化服务为车企分层次提供自动驾驶域控制器解决方案。
➤ 上汽零束的舱驾合一HPC
上汽零束计划在2024年量产两域融合电子电气架构,由两个高性能计算单元HPC和四个区域控制器组成。其中舱驾一体HPC将打造模块化、可扩展的软硬件一体化技术架构,融合智能座舱与与高阶自动驾驶。
上汽零束全栈3.0双域融合架构
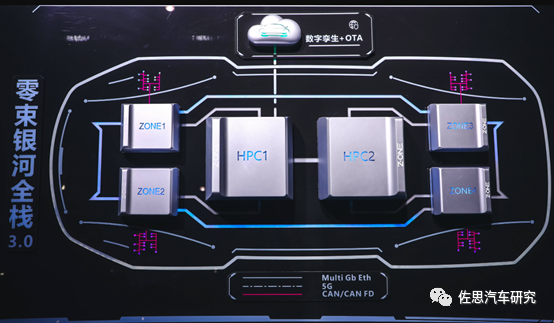
来源:网络
整车中央控制域已率先实现大规模量产
目前,将车身域、底盘域和动力域融合成一个整车中央控制域,再与智能座舱域和智能驾驶域组成经典的三域架构,是部分主机厂布局的下一代电子电气架构。从时间节点上来看,2021-2022年有众多搭载三域架构的车型量产上市。
部分车企三域融合架构量产情况

来源:佐思汽研《2022年多域计算和区域控制器研究报告》
➤ 理想三域融合架构:LEEA 2.0
2022年6月,理想发布最新车型L9,采用三域融合架构,整车分为中央控制域、自动驾驶域和智能座舱域三个域控制器。其中,中央控制域控制器融合了动力、车身以及部分底盘的功能,实现了多域融合。
理想L9中央域控制器

来源:网络
区域控制器是承载“多域+中央计算”的关键部件
区域控制器(Zonal Control Unit,ZCU)是整车物理区域的不同种类传感器采集/执行器驱动的中心枢纽以及区域数据中心,可有效承接整车的物理接口,对区域分布的电源进行分配,平衡不同的输入输出控制等,从而支持智能汽车内部的跨域融合。 ZCU可以减少ECU的使用量,大幅减少线束成本,降低重量,减少通信接口,节省空间,还能进一步提升算力利用率。目前,大部分主机厂在规划下一代多域计算架构时,都采用了ZCU。不同主机厂配置ZCU的数量2~6个不等。
➤ 特斯拉ZCU配置方案
以特斯拉为例,在Model 3的中央计算架构中,特斯拉采用了3个ZCU分别位于前车身控制模块、左车身控制模块和右车身控制模块,主要负责各物理区域的配电、驱动和逻辑控制等。特斯拉Model Y进一步将ZCU的数量减为2个,取消了前车身控制模块,并将其功能整合到左右车身控制模块中,ZCU功能进一步集成。
特斯拉Model 3区域控制器配置方案
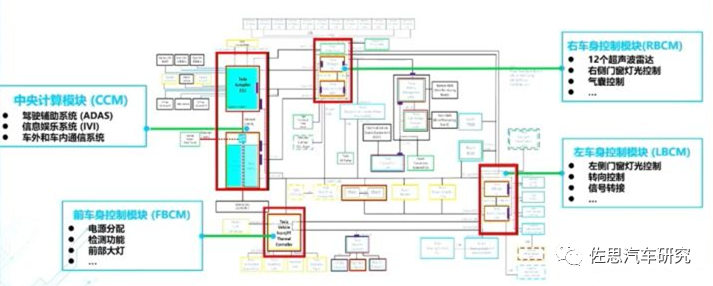
来源:网络
➤ 安波福ZCU产品:电源数据中心PDC
2022年1月,安波福发布了其区域控制器产品——电源数据中心PDC(PowerData Center,PDC),分别位于车身前侧和后侧。 安波福PDC将车辆周围的传感器和执行器的输入/输出(I/O)从算力(负责进行处理的OSP、CVC等)中抽离出来,它还通过基于服务的标准化API消除设备层对计算层的依赖,进而显著简化硬件的互换性。
安波福ZCU配置方案
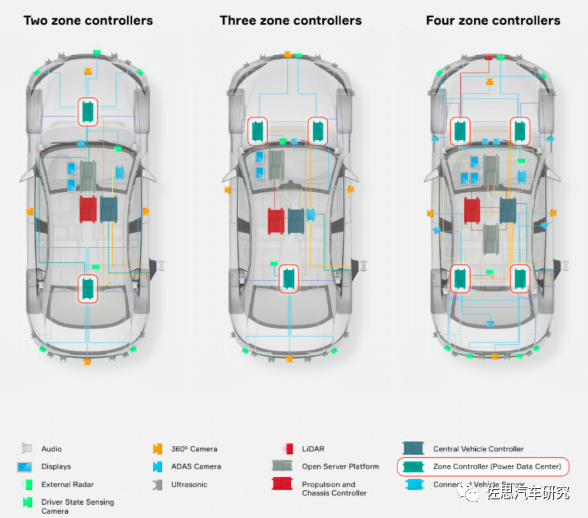
来源:网络
审核编辑 :李倩