 基于单片机的机器人系统电路设计
基于单片机的机器人系统电路设计
电路图基础2026-03-07
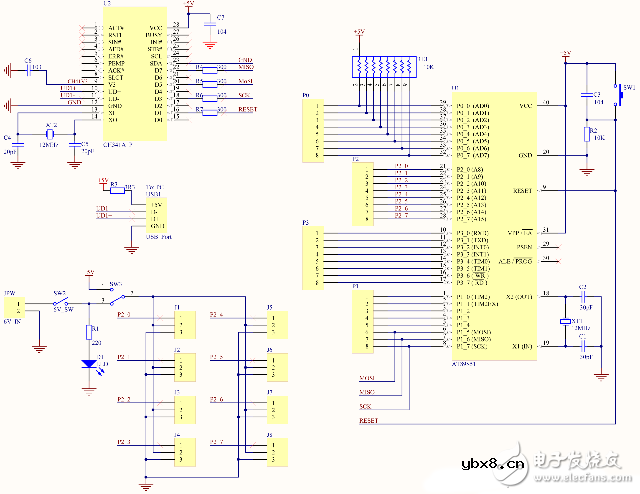
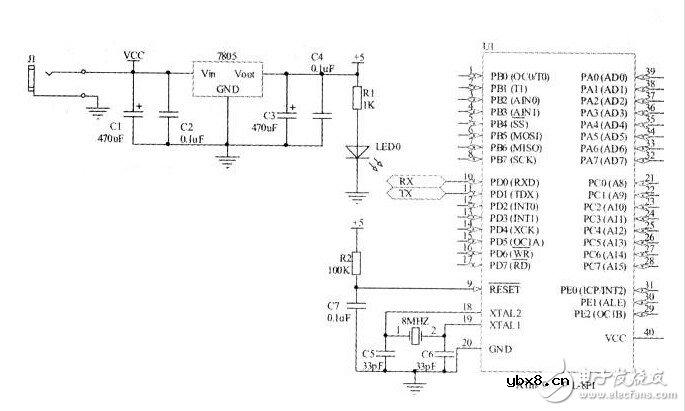
AT89S51 的编程方式可分为并行及串行模式。由于目前PC台式及及笔记本已经逐渐取消并口,因此并口编程器已经逐渐被淘汰。采用USB接口的ISP编程器比较适合实验之用。本书所附赠的电路就是以USB ISP串行模式来对
 基于无线通信的嵌入式机器人控制系统电路设计
基于无线通信的嵌入式机器人控制系统电路设计
电路图基础2026-03-07
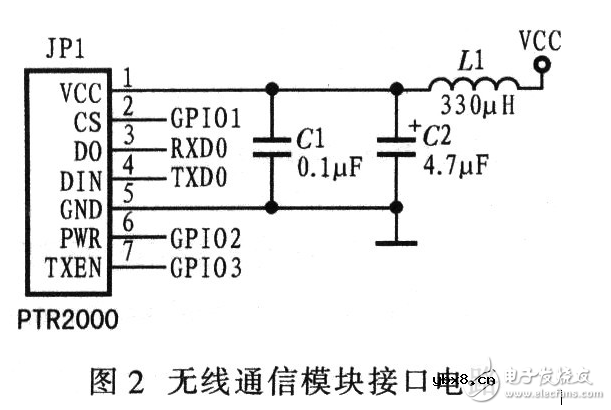
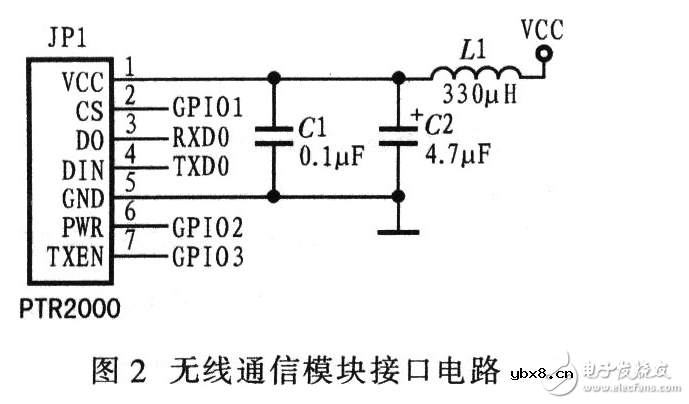
轮式移动机器人是机器人研究领域的一项重要内容,它集机械、电子、检测技术与智能控制于一体,是一个典型的智能控制系统。智能机器人比赛集高科技、娱乐、竞技于一体,已成为国际上广泛开展的高技术对抗活动。
 机器人接触式物体探测技术电路设计
机器人接触式物体探测技术电路设计
电路图基础2026-03-07
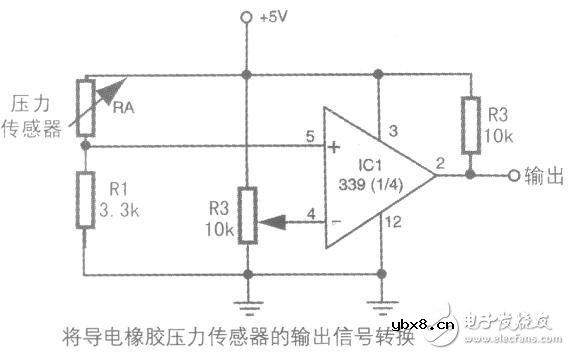
探测物体的一种稳妥的方法就是和物体进行物理的接触。接触可能是物体探测的最常见的形式,而且通常只用简单的开关就可以实现。在这里,我们将介绍一些接触方式,其中包括“软接触”技术,使用这项技术的机器人
 移动音乐机器人系统电路设计
移动音乐机器人系统电路设计
电路图基础2026-03-07
系统原理:该移动音乐机器人以英飞凌16 位单片机XE162FN 处理器为核心,英飞凌开发的16/32 位微控制器具有高度系统集成、无需外设附加器件及相关软件开销、提供系统安全和故障保护机制等功能。蓝牙是一种全球
 基于STC12C5A60S2的教育机器人系统电路设计
基于STC12C5A60S2的教育机器人系统电路设计
电路图基础2026-03-07
目前许多高等教育院校采用教育机器人进行课堂教学和培养学生的创新能力。本文设计的教育机器人通过红外光电传感器阵列检测路面信息并利用模糊自整定PID算法将采集的路面信息和电机运行数据进行实时处理,实现
 小型舞蹈机器人的驱动电路设计
小型舞蹈机器人的驱动电路设计
电路图基础2026-03-07
机器人舞蹈比赛是一项具有极强观赏性和趣味性的比赛。比赛规则要求参赛机器人在有限的场地和时间内,配合音乐完成动作。由于要求机器人既要充分利用场地,又不能超时和越界,因此,舞蹈机器人集成了多学科前沿
 基于DSP仿人机器人关节控制器电路设计
基于DSP仿人机器人关节控制器电路设计
电路图基础2026-03-07
仿人机器人具有可移动性,具有很多的自由度,包括双臂、颈部、腰部、双腿等,可以完成更复杂的任务,这些关节要连接在一起,进行统一的协调控制,就对控制系统的可靠性、实时性提出了更高的要求,以往采用的集
 基于AT89C52自动追踪红外线源机器人电路设计
基于AT89C52自动追踪红外线源机器人电路设计
电路图基础2026-03-07
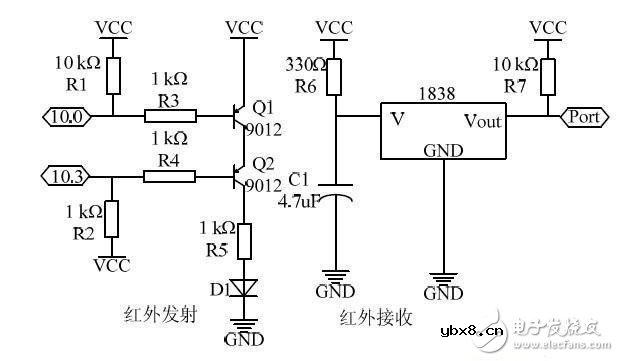
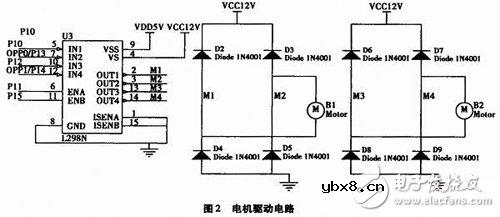
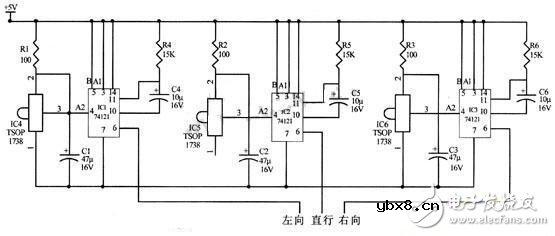
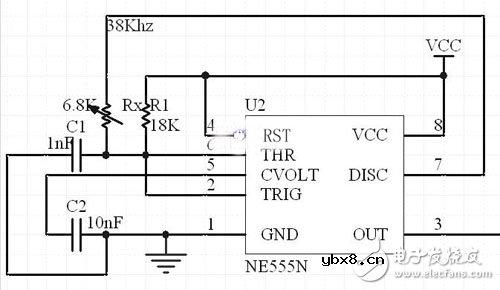
自动追踪红外线源机器人主要由三部分组成:红外线感应接收部分、微处理器和电机驱动部分。各部分功能:红外线感应接收部分检测载波频率为38kHz的红外线发射波;微处理器负责处理传感器输入的信号,并为电机驱
 导购机器人控制系统电路设计 —电路图天天读(49)
导购机器人控制系统电路设计 —电路图天天读(49)
电路图基础2026-03-07
随着科学技术发展和人民生活水平提高,机器人已经开始进入了人们的生活中。这个时代的来临,出现了各种新型机器人,如清扫机器人、安防机器人。移动机器人的最重要的部分之一:导航系统,更加引起机器人领域的
 基于STM32F107的搬运机器人电机控制电路设计
基于STM32F107的搬运机器人电机控制电路设计
电路图基础2026-03-07
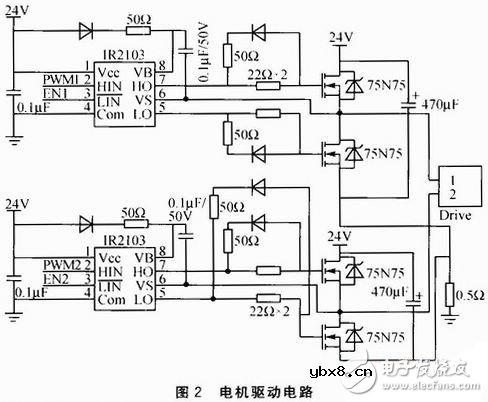
随着人工成本的不断升高,用机器人代替人力去做一些重复性的高强度的劳动是现代机器人研究的一个重要方向。搬运机器人在导航寻迹中,需要后轮驱动电机和前轮舵机的协调工作。搬运机器人电机驱动有其特殊的应用
 基于ARM的自主式移动机器人电路设计
基于ARM的自主式移动机器人电路设计
电路图基础2026-03-07
自主式移动机器人系统是指根据指令任务及环境信息进行自主路径规划,并且在任务执行过程中不断采集局部环境信息,做出决策,从而实现安全行驶并准确到达目标地点的智能系统。本文以LPC2119为控制核心,介绍了
 基于嵌入式的机器人系统电路模块设计
基于嵌入式的机器人系统电路模块设计
电路图基础2026-03-07
机器人要实现的动作和功能较多,需要多个传感器对外界进行检测,并实时控制机器人的位置、动作和运行状态。系统中的所有任务最终都挂在实时操作系统μC/0S一Ⅱ上运行,因此不仅要考虑微控制器的内部资源,还
 带PC机串口通讯的机器人控制系统电路设计
带PC机串口通讯的机器人控制系统电路设计
电路图基础2026-03-07
用AVRmega8515作一个带PC机串口通讯的最小单片机机器人控制系统,电路图见下图。使用时用WINDOWS自带的超级终端,把速率调整到9600,8个数据位.1个停止位,无奇偶效验,无流量控制(握手协议Xon/Xoff).接上
 基于MSP430的智能安防系统电路设计 —电路图天天读(50)
基于MSP430的智能安防系统电路设计 —电路图天天读(50)
电路图基础2026-03-07
以单片机MSP430F149 为主控芯片,设计出一款高精度、高集成度、超低功耗的智能火灾安防报警系统。以环境温度、烟雾浓度作为判断火灾的依据,完成了对火灾的预警。主要由单片机控制模块、时钟模块、烟雾浓度测
 采用LM1812的超声波防碰撞电路设计
采用LM1812的超声波防碰撞电路设计
电路图基础2026-03-07
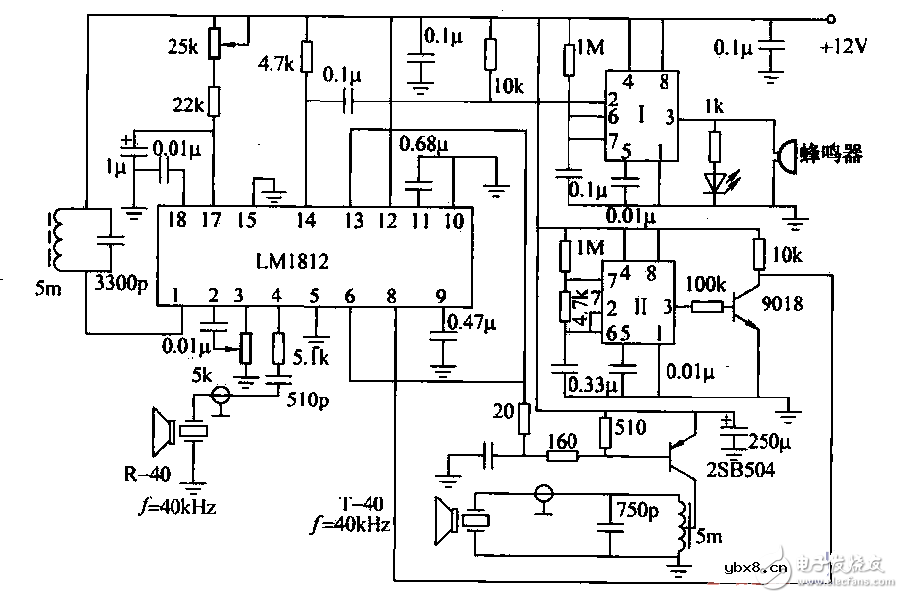
电路原理:所示为超声波防碰撞电路,电路采用LM1812并由时基电路Ⅱ来控制LM1812的发送与接收(LM1812,即发送又接收)。控制距离可用Skfl的电位器来调节,一般可控制2—3m。时基电路1组成单稳态电路,当达到报
 JS20单结晶体管时间继电器电路设计
JS20单结晶体管时间继电器电路设计
电路图基础2026-03-07
电路原理:电路由延时环节、鉴幅器、输出电路、电源和指示灯五部分组成。电源的稳压部分由电阻R,和稳压管vs构成,为延时环节供电,输出电路中的晶闸管VTH和继电器。KA则由半波整流电路直接供电。当接通电源后
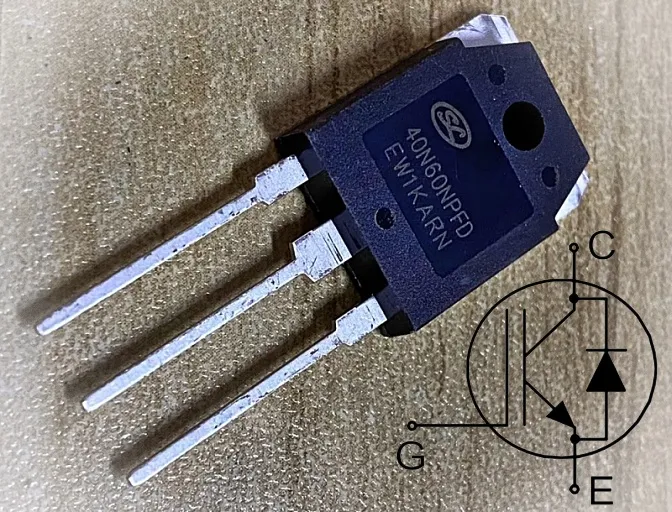 IGBT基础 入门
IGBT基础 入门
时间:2026-07-24
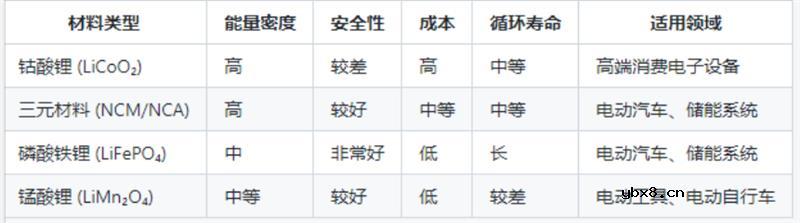 锂离子电池之四种正极材料比较
锂离子电池之四种正极材料比较
时间:2026-07-24
 AM335x处理器在工控系统的应用
AM335x处理器在工控系统的应用
时间:2026-07-24
集成电路传统封装的定义及其作用
时间:2026-07-24
复合材料的的特性与分类
时间:2026-07-24
断路器的结构原理
时间:2026-07-24
风力发电机的工作原理
时间:2026-07-24
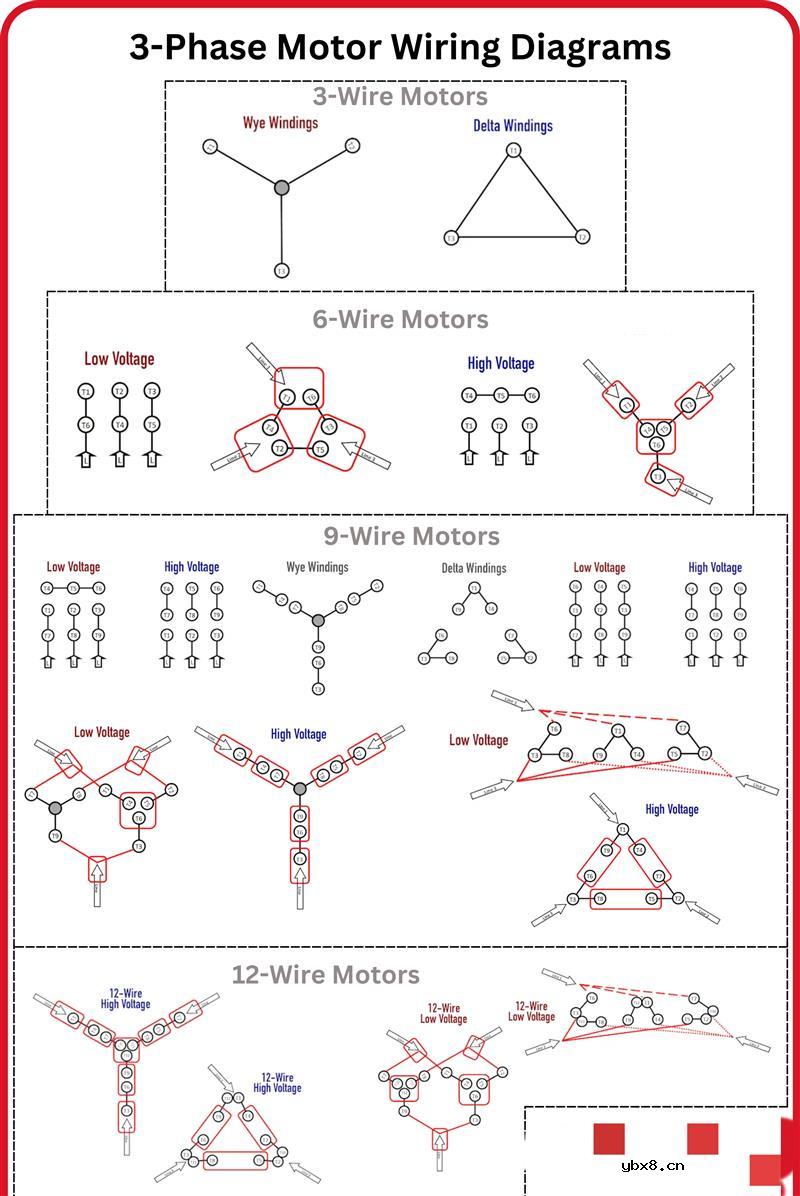 三相电机接线信息图
三相电机接线信息图
时间:2026-07-23
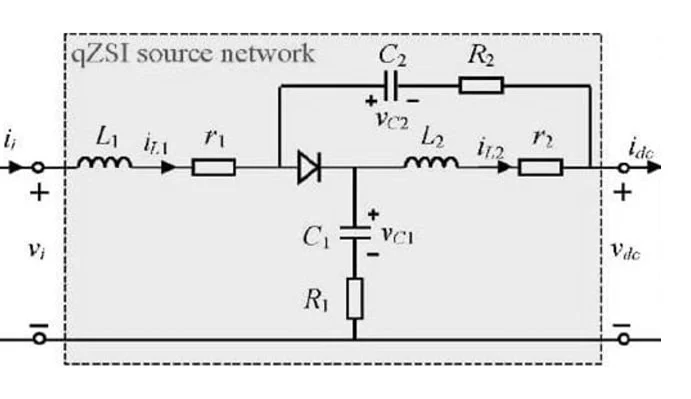 准 Z 源逆变器的设计
准 Z 源逆变器的设计
时间:2026-07-23
关于阻容吸收器的简单介绍
时间:2026-07-23
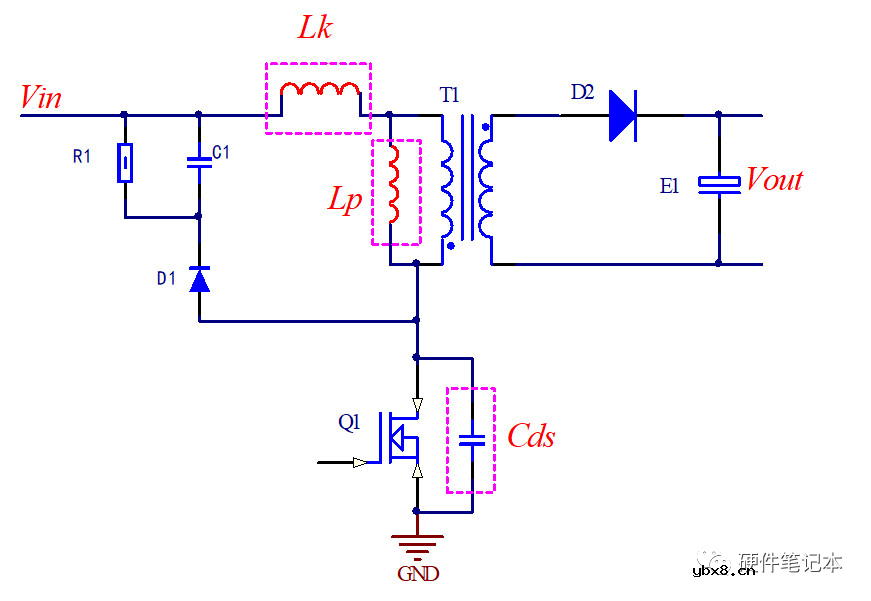 详解RCD钳位电路
详解RCD钳位电路
时间:2026-03-08
三相异步电动机的拆装详讲
时间:2026-03-04
三相异步电动机原理
时间:2026-03-04
 基于逻辑门的构成解释如何完成任意逻辑的管...
基于逻辑门的构成解释如何完成任意逻辑的管...
时间:2026-03-08
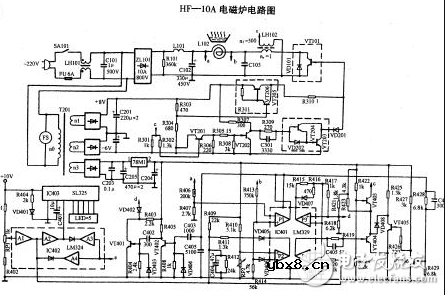 美的电磁炉电路图大全(六款美的电磁炉电路...
美的电磁炉电路图大全(六款美的电磁炉电路...
时间:2026-03-07
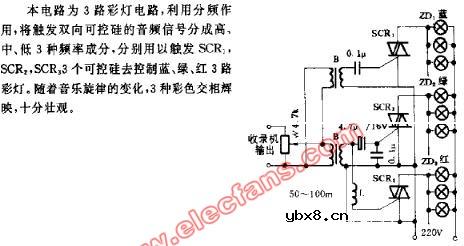 彩灯电路
彩灯电路
时间:2026-03-05
 NE555的有趣电路设计分享
NE555的有趣电路设计分享
时间:2026-03-08
 从0学电路,万用表演示测量三极管方法
从0学电路,万用表演示测量三极管方法
时间:2026-03-08
 光耦在电子电路中作用、关键参数详解
光耦在电子电路中作用、关键参数详解
时间:2026-03-08
 H桥电机驱动电路解析
H桥电机驱动电路解析
时间:2026-03-08